Wykład omawia teoretyczne podstawy komunikacji grupowej – gałęzi przetwarzania rozproszonego zajmującej się systemami, w których osłabia się założenie o stałej liczbie procesów uczestniczących w przetwarzaniu. Procesy organizowane są w dynamicznie zmieniające się grupy, a wszelka komunikacja odbywa się z uwzględnieniem postrzeganego przez procesy stanu grupy.
Pierwsza część wykładu prezentuje założenia oraz specyfikacje związane z własnościami usługi członkostwa, natomiast w drugiej przedstawione są wybrane algorytmy rozsyłania (ang. multicast ), powszechnie stosowane w komunikacji grupowej.
Podstawowe definicje
Komunikację grupową definiuje się jako mechanizm umożliwiający procesom systemu rozproszonego organizowanie się w sposób dynamiczny w grupy i niezawodną wymianę wiadomości w ramach grupy. Za każdy z tych dwóch aspektów odpowiada odrębny mechanizm: usługa członkostwa zajmuje się zarządzaniem składem grupy (dynamiczne dołączanie i odłączanie procesów z grupy), a usługa rozsyłania dostarcza mechanizmu rozgłaszania wiadomości pomiędzy procesami w grupie zgodnie z przyjętym poziomem niezawodności.
Od strony teoretycznej komunikacja grupowa służy jako narzędzie do modelowania komunikacji o podwyższonym poziomie niezawodności (w skrócie - komunikacji niezawodnej) pomiędzy procesami przy zmieniającym się zbiorze uczestniczących w przetwarzaniu procesów.
Systemy komunikacji grupowej GCS (od nazwy angielskiej Group Communication System ) powszechnie wykorzystuje się w aplikacjach, które potrzebują skorzystać na niższym poziomie z mechanizmów łączenia procesów w grupy oraz niezawodnej komunikacji pomiędzy procesami w grupie. Wśród przykładowych zastosowań można wymienić: systemy konferencyjne, gry sieciowe czy systemy o podwyższonej niezawodności, wykorzystujące zwielokrotnianie (ang. replication ).
Model systemu zakłada, że procesy organizowane są w grupy oraz że komunikacja pomiędzy procesami ma charakter grupowy.
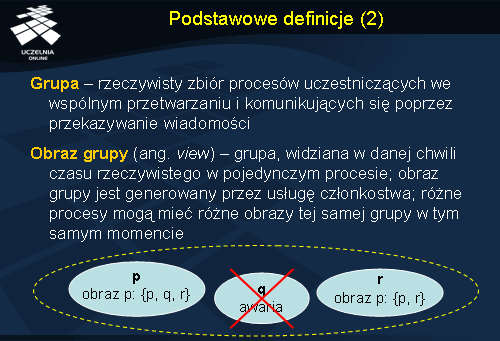
Grupa to rzeczywisty zbiór procesów, uczestniczących w danej chwili we wspólnym przetwarzaniu (np. obliczenia inżynierskie, systemy medyczne czy militarne) i komunikujących się poprzez przekazywanie wiadomości (ang. message passing ). Obraz grupy to z kolei stan grupy widziany w danej chwili czasu rzeczywistego w procesie.
Obraz grupy może się znacząco różnić od rzeczywistej grupy, a ponadto obrazy grupy mogą być różne w różnych procesach. W przykładzie na rysunku, proces q ulega awarii, co z punktu widzenia komunikacji grupowej oznacza opuszczenie grupy. W obrazie procesu r proces q opuścił już grupę, zaś w obrazie procesu p – jeszcze nie, a przez to obrazy procesów p i r są różne.
Należy podkreślić, że z punktu widzenia aplikacji nie rozróżnia się awarii procesu od jawnego opuszczenia przez niego grupy – obydwa te przypadki są aplikacji przedstawiane po prostu jako opuszczenie grupy.
Model matematyczny
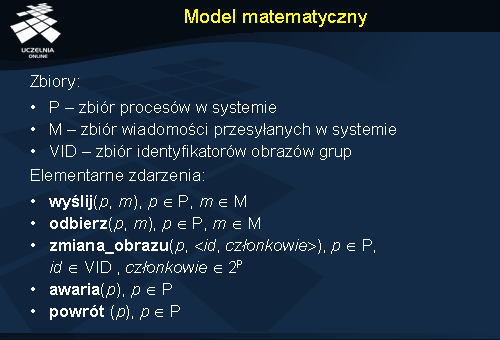
W definicjach specyfikacji wystąpią następujące zbiory:
P – zbiór procesów w systemie;
M – zbiór wiadomości przesyłanych w systemie;
VID – zbiór identyfikatorów obrazów grup.
Wyróżnia się następujące elementarne zdarzenia w systemie:
wyślij(p , m) – proces p wysyła wiadomość m ; zauważmy, że nie określa się odbiorcy, gdyż wiadomość wysyłana jest do całej grupy
odbierz(p , m) – proces p odbiera wiadomość m ; nadawca wiadomości może być określony, ale tutaj dla uproszczenia nie jest;
zmiana_obrazu(p , <id, członkowie>) – w procesie p następuje zmiana obrazu; nowy obraz o identyfikatorze id zawiera procesy
określone zmienną członkowie . Sam obraz zaś jest parą (id , członkowie ), obejmującą globalny identyfikator obrazu i należące do niego procesy. Dwa obrazy V i V’ są więc równe wtedy i tylko wtedy, gdy równe są ich identyfikatory oraz zbiory procesów.
awaria(p ) – proces p ulega awarii
powrót(p ) – proces p wznawia działanie po awarii
Architektura systemu
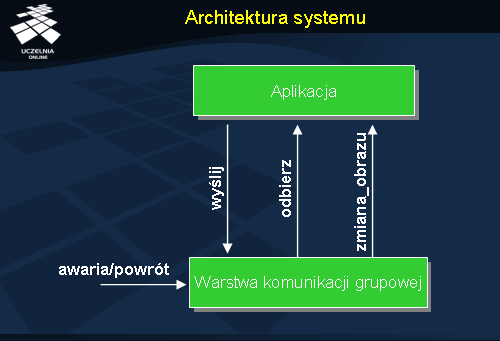
Oprogramowanie realizujące komunikację grupową stanowi warstwę usługową dla aplikacji, stąd znajduje się poniżej aplikacji. Wejściowe zdarzenie wyślij zachodzi z inicjatywy aplikacji, zgłaszającej wysłanie wiadomości do grupy. Wyjściowe zdarzenia odbierz i zmiana_obrazu są natomiast zgłaszane przez warstwę komunikacji grupowej. Wejściowe zdarzenia awaria i powrót zgłasza detektor uszkodzeń, którego istnienie i poprawne działanie tutaj zakładamy.
Warstwa komunikacji grupowej, realizująca system komunikacji grupowej, jest zazwyczaj złożona z wielu podwarstw, realizujących takie funkcje, jak np. wspomniane już zarządzanie grupami (ang. membership ), rozsyłanie (ang. multicast ), funkcje wznawiania pracy procesu po awarii, uzgadnianie i inne. Na styku z aplikacją dostarcza jednak przejrzystego interfejsu, dzięki czemu projekt i implementacja aplikacji są znacząco uproszczone.
Predykaty
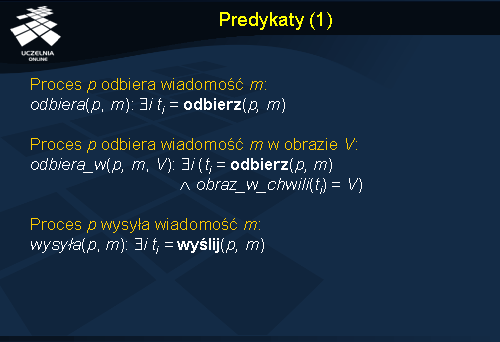
Powyższe predykaty budowane są na podstawie elementarnych zdarzeń, przedstawionych wcześniej.
Predykat obraz_w_chwili definiuje obraz, jaki w procesie p istnieje w chwili zajścia zdarzenia ti.
Predykat odbiera zachodzi, gdy proces p odbierze wiadomość m w dowolnej chwili. Predykat odbiera_w określa dodatkowo, w jakim obrazie proces p odbiera wiadomość m .
Predykat wysyła jest prawdą, jeśli proces p wysłał wiadomość m w dowolnej chwili.
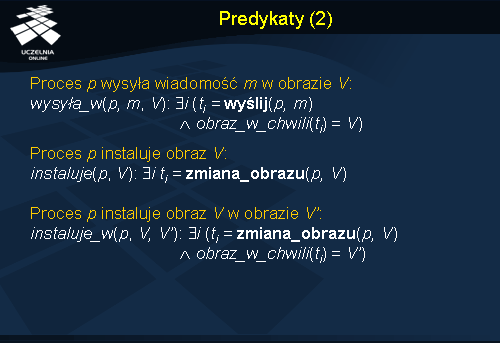
Predykat wysyła_w jest prawdziwy, gdy proces p wyśle wiadomość m w konkretnym obrazie V .
Predykat instaluje zostaje spełniony, gdy proces p zmieni obraz grupy na V .
Predykat instaluje_w oznacza zmianę obrazu z dotychczasowego V ’ na nowy, V . Zmiana obrazu może być spowodowana dołączeniem lub odłączeniem pewnego zbioru procesów do- lub z grupy. Należy pamiętać, że odłączenie procesu modeluje jego faktyczne odłączenie po zakończeniu obliczeń albo awarię, wykrytą i zgłoszoną przez detektor uszkodzeń.
Ponieważ predykat instaluje_w uwzględnia poprzedni obraz grupy, jest szczególnie przydatny w tych własnościach, które uwzględniają historyczne obrazy w procesie (najczęściej tylko poprzedni); przykładem takiej własności jest wirtualna synchronizacja, omówiona w dalszej części.
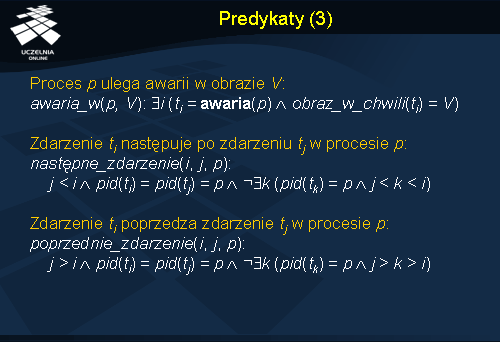
Predykat awaria_w zachodzi wówczas, gdy awaria procesu p nastąpi w chwili, gdy w procesie tym pamiętany jest obraz grupy V.
O bezpośrednim poprzedzaniu i następstwie zdarzeń w jednym procesie mówią predykaty następne_zdarzenie i poprzednie_zdarzenie.
Przedstawione predykaty posłużą w dalszej części prezentacji do definiowania różnych własności systemów komunikacji grupowej.
Założenia odnośnie środowiska
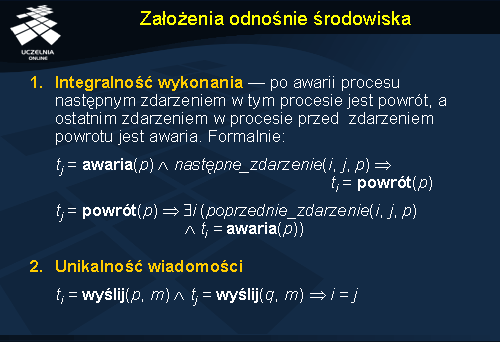
Założenie o integralności wykonania (ang. execution integrity ) wymaga, by pomiędzy zdarzeniami awaria i powrót w jednym procesie nie następowało żadne inne zdarzenie. Innymi słowy, przyjmuje się model awarii znany pod nazwą awaria-wznowienie (ang. crash-recovery ). W modelu tym, w odróżnieniu od modelu awarii bizantyjskich, przyjmuje się, że proces po awarii nie wykonuje żadnych akcji (np. nie wysyła i nie odbiera wiadomości).
W jeszcze prostszym modelu awarii, nazywanym modelem „awaria-stop” (ang. fail-stop ) nie dopuszcza się nawet wznowienia pracy po awarii – proces, który jej uległ, przestaje działać na zawsze. W uproszczeniu można powiedzieć, że różnica pomiędzy modelami awaria-wznowienie i awaria-stop polega na tym, że w tym drugim nie ma zdarzenia powrotu z awarii i wznowienia pracy procesu.
Założenie o unikalności wiadomości wymaga, by każda wiadomość m była niepowtarzalna; najczęściej osiąga się to poprzez przypisanie każdej wiadomości unikalnego identyfikatora wiadomości, złożonego na przykład z identyfikatora nadawcy połączonego z numerem sekwencyjnym lub znacznikiem czasowym. Dzięki temu założeniu można wymagać, by każda wiadomość w systemie była wysłana najwyżej jeden raz.
Usługa członkostwa - własności
Przez własność należy rozumieć gwarancję dostarczaną przez system. Oczywiście w różnych systemach dostępne są różne gwarancje, zależne od decyzji twórców systemu.
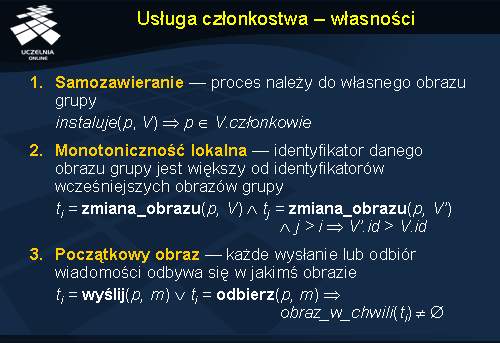
Własność samozawierania (ang. self inclusion ) mówi, że dany proces powinien należeć do własnego obrazu grupy. Ponieważ każdy proces zawsze jest w stanie komunikować się z sobą samym, gwarancji tej dostarczają wszystkie znane systemy komunikacji grupowej.
Własność monotoniczności lokalnej (ang. local monotonicity ) wymaga, by identyfikator danego obrazu grupy był większy od identyfikatorów wcześniejszych obrazów.
Własność początkowego obrazu (ang. initial view event ) wymaga zaś, by każde wysłanie lub odbiór wiadomości następowało w pewnym obrazie. W szczególności oznacza to, że na samym początku przetwarzania musi w procesie istnieć pewien obraz grupy.
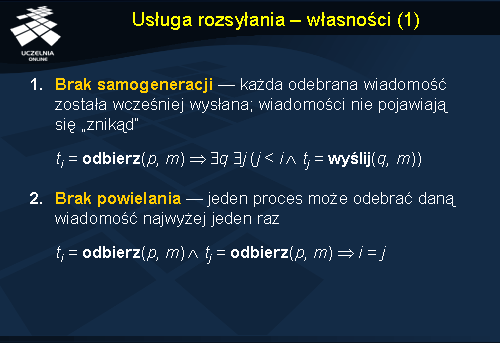
Własności braku samogeneracji (ang. delivery integrity ) oraz braku powielania (ang. no duplication ) stawiają wymagania kanałom komunikacyjnym. Pierwsza z nich stanowi, że każda odebrana wiadomość musi mieć swojego nadawcę, który wcześniej ją wysłał. Innymi słowy, kanał sam z siebie nie może wygenerować wiadomości, bo z punktu widzenia systemu pojawiłaby się ona „znikąd”. Druga zaś własność wymaga, by jeden proces nie mógł odebrać danej wiadomości więcej, niż jeden raz.
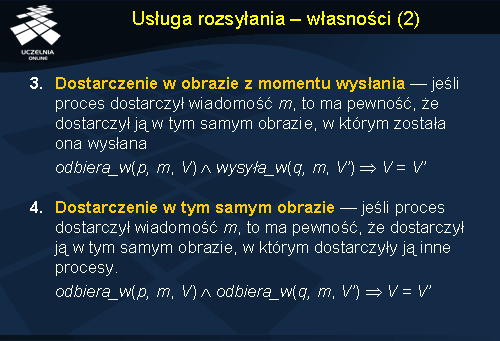
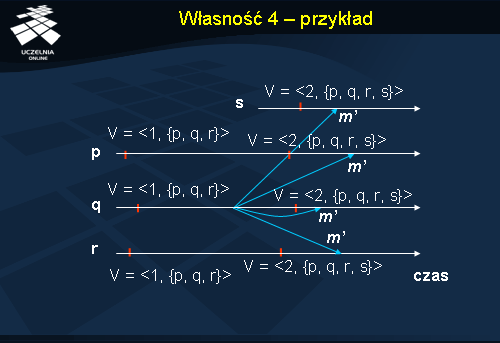
Słabsza własność 4, dostarczenie w tym samym obrazie (ang. same view delivery ), nie wymaga już, by obraz w procesie odbierającym był równy obrazowi z momentu wysłania. Nadal jednak wymaga, by obrazy wszystkich procesów odbierających były sobie równe.
Własność 3 - przykład
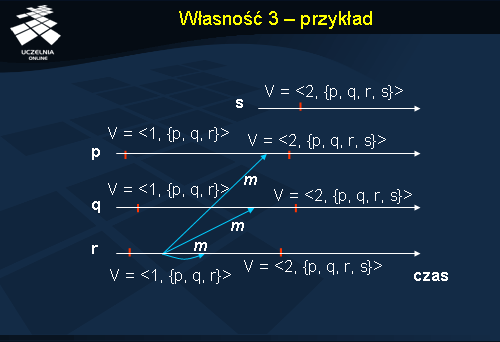
W przykładzie na rysunku dla wiadomości m zagwarantowano własność dostarczenia w obrazie z momentu wysłania, gdyż została dostarczona do odbierających ją procesów w tym samym obrazie, w którym proces r ją wysłał. W przykładzie odbierają ją wszystkie procesy należące do obrazu, choć przypomnijmy, że nie musiałoby tak być – ważne jest tylko, by w odbierających procesach dostarczenie wiadomości nastąpiło w tym samym obrazie, w którym zaszło wysłanie.
Własność 4 - przykład
Usługa rozsyłania - własności (3)
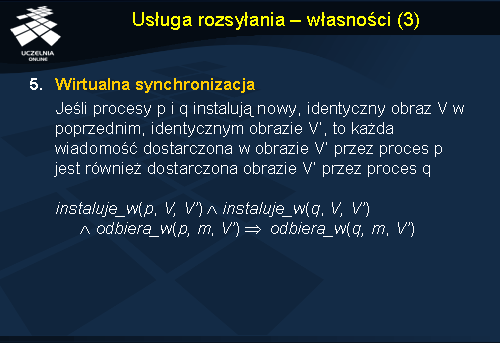
Najpopularniejsza we współczesnych systemach komunikacji grupowej jest własność wirtualnej synchronizacji (ang. virtual synchrony lub view synchrony ). Wymaga ona, by wszystkie procesy, które ze starego obrazu V ’ przechodzą do nowego obrazu V , dostarczyły przed zainstalowaniem nowego obrazu (czyli jeszcze w starym) każdą wiadomość, którą dostarczył choć jeden proces. Innymi słowy, wymaga się od procesów dostarczania tych samych zbiorów wiadomości w tych samych obrazach. Intuicyjnie oznacza to, że procesy są synchronizowane kolejnymi zmianami obrazów – zmiana obrazu jest barierą, której proces nie może przekroczyć, jeśli nie odebrał wymaganych wiadomości.
Własność ta jest bardzo przydatna na przykład w systemach rozproszonych wykorzystujących zwielokrotnianie, w których kopie danego obiektu najczęściej tworzą grupę. Wiele modeli spójności na niższym poziomie wymaga zachowania pewnych gwarancji komunikacji grupowej, w tym często właśnie wirtualnej synchronizacji.
Należy jeszcze podkreślić zasadniczą różnicę pomiędzy wirtualną synchronizacją a własnościami dostarczenia w obrazie z momentu wysłania czy dostarczenia w tym samym obrazie.. Otóż wirtualna synchronizacja stawia wymagania wszystkim procesom zmieniającym obraz, co w praktyce najczęściej oznacza wszystkie procesy w grupie.
Można ponadto zauważyć, że wirtualna synchronizacja jest ściśle silniejsza od własności dostarczenia w tym samym obrazie, natomiast jest nieporównywalna z własnością dostarczenia w obrazie z momentu wysłania.
Wirtualna synchronizacja - przykład
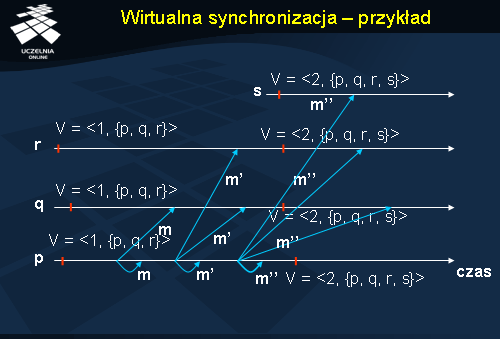
W przedstawionym przykładzie, dla wiadomości m zachowana jest własność dostarczenia w obrazie z momentu wysłania (odbierające procesy p i q dostarczają wiadomość w obrazie 1, w którym została ona wysłana), a tym samym własność dostarczenia w tym samym obrazie (wszystkie odbierające procesy dostarczają wiadomość w tym samym obrazie), nie jest natomiast zachowana własność wirtualnej synchronizacji, gdyż nie wszystkie procesy zmieniające obraz grupy ją dostarczyły.
Dla wiadomości m ’ zachowano każdą z trzech własności. W przypadku wiadomości m ’’ zaś nie jest zachowana żadna z trzech własności, gdyż proces p dostarcza tę wiadomość w innym obrazie, niż pozostałe procesy.
Należy zaznaczyć, że zazwyczaj należy dostarczać tylko jednej konkretnej gwarancji, zależnej od wymagań aplikacji w zakresie niezawodności. Ponieważ jednak celem rysunku jest ukazanie różnic pomiędzy wspomnianymi własnościami, wspomina się dla każdej wiadomości o każdej własności.
Przykładowe systemy
Wymienione tu projekty to przykłady popularnych systemów komunikacji grupowej, nazywanych skrótowo systemami GCS (ang. Group Communication System ). Są one realizowane jako warstwa pośrednia oprogramowania (ang. middleware ), oferująca usługi w zakresie zarządzania grupami i niezawodnej komunikacji w grupach. Dwa z nich zostaną omówione bardziej szczegółowo na kolejnych slajdach. Opis oraz rysunki oparto na pracy „A Step Towards a New Generation of Group Communication Systems”, wymienionej w bibliografii.
System Isis
Isis jest pierwszym systemem, w którym zaproponowano wyodrębnienie mechanizmów komunikacji grupowej. Należy do grupy systemów monolitycznych, czyli niemodularnych, a więc takich, w których architektura jest stała i nie może być dostosowana do konkretnych potrzeb aplikacji. Oczywistą wadą takich systemów jest konieczność dostosowania aplikacji do nich oraz konieczność użycia wszystkiego, co oferuje system – nawet, jeśli byłoby to zbędne i skutkowało spadkiem efektywności pracy.
Ponadto, Isis jest systemem zgodnym z modelem głównej partycji (ang. primary partition ), co oznacza, że przy podziale sieci przetwarzanie jest kontynuowane tylko w głównym jej fragmencie, w tak zwanej głównej partycji. W szczególności oznacza to, że wszystkie procesy głównej partycji otrzymują taką samą sekwencję obrazów grupy.
Architektura systemu Isis
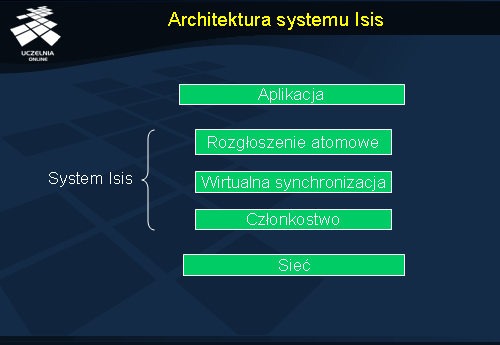
Warstwa członkostwa jest odpowiedzialna za zarządzanie składem grupy, obejmujące monitorowanie wykrywanie zdarzeń leave , oznaczających opuszczenie grupy (na skutek zakończenia przetwarzania lub awarii procesu) oraz obsługę zdarzeń join dołączenia do niej nowego procesu. Warstwa ta zapewnia procesom dostarczanie nowych obrazów grupy w takiej samej kolejności, w całkowitym uporządkowaniu (ang. total order ).
Warstwa członkostwa nie dostarcza jednak żadnych mechanizmów komunikacyjnych. Z tego powodu została rozszerzona o warstwę wirtualnej synchronizacji , realizującą rozgłaszanie wiadomości do aktualnych członków grupy.
Najwyższa warstwa, rozgłaszania atomowego , zapewnia, że wiadomości aplikacyjne są dostarczane w tej samej kolejności przez wszystkie procesy. Rozgłaszanie atomowe jest tutaj zrealizowane w oparciu o znajdującą się niżej warstwę wirtualnej synchronizacji.
System Horus/Ensemble
Architektura systemu Horus
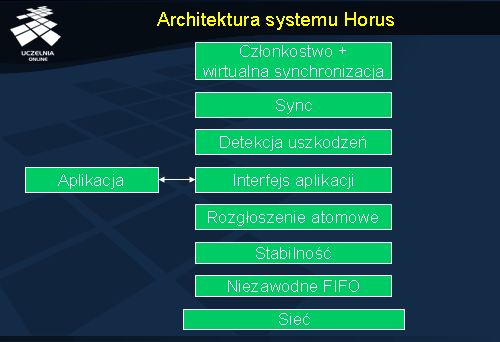
Na rysunku przedstawiono przykładowy stos protokołów systemu Horus:
Należy zaznaczyć, że informacje o zdarzeniach w systemie Horus przekazywane są w górę stosu , począwszy od najniżej działającej warstwy. Warstwa generująca dane zdarzenie propaguje je najpierw w dół stosu, a następnie informacja o nim „odbija się” od najniższej warstwy i wędruje w górę, do najwyższej.
Komponent Niezawodne FIFO realizuje kanały komunikacyjne, zachowujące uporządkowanie wiadomości FIFO, polegające na dostarczaniu wiadomości od danego nadawcy zgodnie z kolejnością ich wysłania przez tego nadawcę (szerzej omówiono to zagadnienie w drugiej części wykładu, poświęconej wybranym algorytmom komunikacji grupowej).
Warstwa Stabilność zajmuje się sprawdzaniem, czy wiadomości na danym poziomie zostały odebrane przez wszystkie procesy w grupie. O takich wiadomościach mówi się, że są stabilne . Wiadomości stabilne wykorzystuje się w aplikacjach wymagających wysokiej niezawodności przy dostarczaniu wiadomości, na przykład do zaimplementowania wirtualnej synchronizacji. Najczęściej stabilne wiadomości zostają trwale zapisane, by mogły przetrwać ewentualną awarię maszyny lub aplikacji i zostać dostarczone po wznowieniu pracy. Warstwa Stabilność może zostać umieszczona w wielu miejscach stosu; wybór jej lokalizacji ma jednak wpływ na efektywność pracy.
Warstwa rozgłaszania atomowego porządkuje wiadomości, ale robi to tylko w sytuacjach bezawaryjnych. Gdyby więc nie skorzystano z dodatkowych komponentów odpowiedzialnych za detekcję uszkodzeń i członkostwo, wówczas różne algorytmy rozgłaszania atomowego blokowałyby się w przypadku awarii lub podziału sieci.
Co ważne, aplikacja nie jest umieszczona w najwyższej warstwie. Dzieje się tak z przyczyn wydajnościowych – gdyby aplikacja była na samej górze, dostarczanie do niej informacji o zachodzących zdarzeniach trwałoby dłużej. Bardziej efektywnym rozwiązaniem jest umieszczenie komponentów aktywnych w normalnych sytuacjach poniżej aplikacji, a komponentów aktywnych w nadzwyczajnych sytuacjach, które są rzadziej wykorzystywane, powyżej aplikacji.
Warstwa Sync blokuje procesy podczas zmiany obrazu grupy, a warstwa członkostwa i wirtualnej synchronizacji dostarcza mechanizmów zarządzania grupą i wirtualnej synchronizacji.
Algorytmy niezawodnej komunikacji grupowej
Druga część wykładu dotyczy algorytmów niezawodnego rozsyłania (ang. multicast ) wiadomości pomiędzy procesami w grupie. Omówione zostaną podstawowe algorytmy: niezawodne rozesłanie bez dodatkowych gwarancji na kolejność wiadomości (RB), niezawodne rozesłanie z dodatkową gwarancją uporządkowania FIFO (FIFO-RB), niezawodne rozesłanie z gwarancją uporządkowania przyczynowego wiadomości (Przyczynowy-RB) oraz niezawodne rozesłanie atomowe.
Dla każdego algorytmu dopuszcza się awarie procesów oraz kanałów komunikacyjnych. Szczegółowe założenia będą podane przy konkretnych algorytmach.
W dalszej części prezentacji terminy „rozesłanie” i „rozgłoszenie” są używane zamiennie i oznaczają to samo – wysłanie wiadomości do wszystkich procesów w grupie.
Własności niezawodnego rozgłoszenia
Zadaniem algorytmu niezawodnego rozgłaszenia (ang. Reliable Broadcast – RB ) jest dostarczenie wiadomości wszystkim poprawnym procesom (tzn. procesom, które na pewno nie ulegną awarii w trakcie przebiegu algorytmu) pomimo awarii innych procesów lub kanałów komunikacyjnych. Specyfikacja algorytmu obejmuje następujące własności:
Ważność – wymaga, by jeśli poprawny proces rozgłosił wiadomość, wszystkie poprawne procesy w skończonym czasie dostarczyły tę wiadomość.
Zgodność – wymaga, by jeśli choć jeden poprawny proces dostarczył wiadomość, wszystkie procesy dostarczyły tę wiadomość, nawet jeśli proces nadawcy był niepoprawny (np. uległ awarii podczas rozsyłania i nie zdołał wiadomości wysłać do wszystkich procesów).
Integralność – wymaga, by daną wiadomość każdy proces dostarczył najwyżej jeden raz i to pod warunkiem, że została ona wcześniej rozgłoszona przez jakiś (niekoniecznie poprawny) proces.
Algorytm RB - założenia
Uwaga : W dalszej części prezentacji wyróżniamy dwa zdarzenia odbioru wiadomości, wykorzystane w przedstawianych algorytmach:
odbierz – wiadomość została już odebrana przez podwarstwę komunikacji grupowej, ale jeszcze nie przez proces
dostarcz – wiadomość odbiera proces/aplikacja.
Ponadto, przez rozgłoś(T , m) i dostarcz(T , m) oznaczamy dwie elementarne operacje związane z rozgłoszeniem typu T (R – niezawodne, F – FIFO, C – przyczynowe, A – atomowe).
Algorytm RB dla procesu p
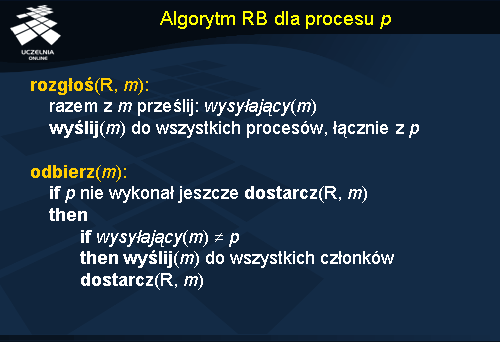
Należy podkreślić, że dla poprawnego działania algorytmu potrzebne jest, by do każdej wiadomości proces nadawcy dołączał swój identyfikator oraz numer sekwencyjny wiadomości; te dwa parametry tworzą razem unikalny identyfikator wiadomości.
Twierdzenie : Przy założeniu, że w systemie każde dwa poprawne procesy są połączone przez ścieżkę poprawnych łączy i procesów, można udowodnić, że algorytm RB realizuje niezawodne rozgłoszenie w takim systemie.
Algorytm RB - sytuacja standardowa
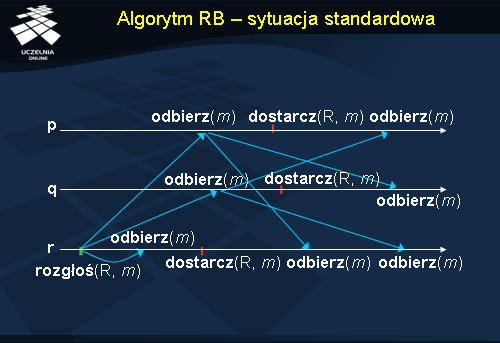
Jak widać na rysunku, dostarczenie wiadomości do każdego procesu następuje jeden raz; późniejsze zdarzenia odebrania wiadomości nie skutkują jej dostarczeniem. W sytuacji, gdy nie zachodzi żadna awaria, dodatkowe komunikaty nie wnoszą nic do algorytmu, natomiast zwiększają złożoność komunikacyjną. Podniesienie poziomu niezawodności odbywa się więc kosztem zwiększenia złożoności komunikacyjnej i czasowej.
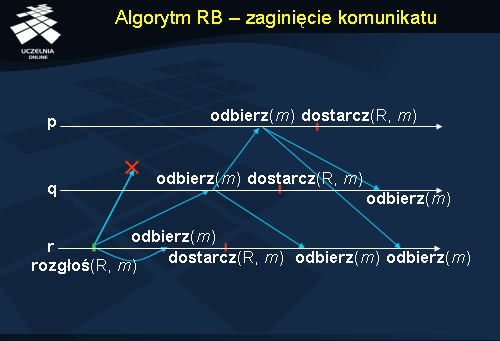
Algorytm RB - zaginięcie komunikatu
Algorytm FIFO-RB - specyfikacja
Porządek FIFO wymaga, by wiadomości wysyłane przez dany proces były dostarczane do odbiorców w takiej samej kolejności, w jakiej wysyłał je ten proces. Do zagwarantowania tego wystarcza numerowanie w procesie nadawcy wysyłanych przez niego wiadomości.
Algorytm FIFO-RB to taki algorytm niezawodnego rozgłaszania, który dodatkowo gwarantuje uporządkowanie FIFO wiadomości. Algorytm FIFO-RB korzysta na niższym poziomie z algorytmu RB.
Studentowi pozostawia się jako ćwiczenie podanie przykładu przebiegu przestrzenno-czasowego, w którym zostanie naruszone uporządkowanie FIFO.
Algorytm FIFO-RB
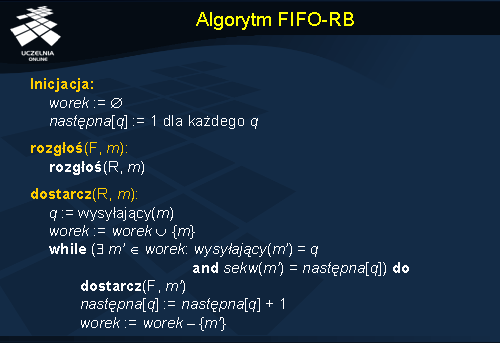
Niezawodne rozgłaszanie w algorytmie FIFO-RB polega na rozgłoszeniu zgodnym z algorytmem RB. Należy pamiętać, że każda wiadomość posiada numer sekwencyjny, nadany jej przed wysłaniem przez nadawcę.
Zanim wiadomość zostanie dostarczona zgodne z uporządkowaniem FIFO, najpierw następuje niezawodne dostarczenie jej przez działający poniżej algorytm RB. Następnie sprawdza się, czy dana wiadomość jest oczekiwaną wiadomością, tzn. czy jest kolejną wiadomością, której proces odbierający spodziewa się od danego nadawcy. Fakt, że dana wiadomość jest kolejną, stwierdza się po wartości towarzyszącego jej numeru sekwencyjnego – powinien on być o jeden większy, niż pamiętany w procesie odbiorcy.
Zmienna worek pamięta wszystkie te wiadomości, które zostały już dostarczone przez algorytm RB, ale jeszcze nie zostały dostarczone przez algorytm FIFO-RB.
W tablicy następna są zaś pamiętane numery sekwencyjne odpowiadające poszczególnym procesom-nadawcom w grupie.
/*zbiór wiadomości, które p R-dostarczył, ale jeszcze nie F-dostarczył*/
/* numer sekwencyjny następnej wiadomości, którą p F-dostarczy*/
Relacja poprzedzania przyczynowego
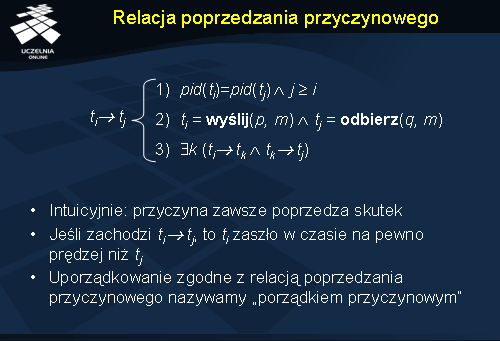
Relacja poprzedzania przyczynowego , nazywana również porządkiem przyczynowym, bierze swoją nazwę od angielskiej nazwy Causal Order . Formalna definicja relacji poprzedzania przyczynowego jest następująca:
Zdarzenie tj jest przyczynowo zależne od zdarzenia ti (lub inaczej – ti poprzedza tj), gdy:
- obydwa te zdarzenia zachodzą w tym samym procesie i ti wystąpiło wcześniej niż tj, lub
- ti jest zdarzeniem wysłania wiadomości, a tj jest - zdarzeniem jej odebrania, lub
- gdy pomiędzy zdarzeniami ti a tj zachodzi inne zdarzenie, tk, takie że poprzedza je ti, ale jednocześnie ono samo poprzedza tj.
Ostatni warunek w powyższej definicji ma charakter rekurencyjny. Zdarzeń pośredniczących pomiędzy ti a tj może być wiele, ale relacja poprzedzania przyczynowego może zachodzić pomiędzy kolejnymi ich parami, a przez to również pomiędzy ti a tj.
Rozgłaszanie przyczynowe - przykłady
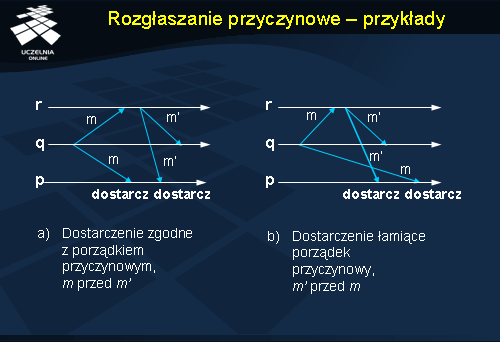
Na rysunku a) pokazano przykład dostarczenia przez proces p dwóch wiadomości, m i m ’. Ponieważ wysłanie wiadomości m ’ następuje w procesie r po zdarzeniu odebrania wiadomości m , więc zgodnie definicją porządku przyczynowego (warunek 1) wiadomość m ’ jest przyczynowo zależna od m i jako taka powinna być dostarczona w każdym procesie później niż wiadomość m . Proces p właśnie tak dostarcza wiadomości m i m ’, dzięki czemu porządek przyczynowy zostaje zachowany.
Na rysunku b) zaś widać przykład złamania porządku przyczynowego. Wiadomość m ’ zależna przyczynowo od m została dostarczona w procesie p przed wiadomością m ; porządek przyczynowy został tutaj złamany.
Ze względu na to, że własność uporządkowania przyczynowego jest ściśle silniejsza niż własność uporządkowania FIFO, zachowanie porządku przyczynowego implikuje zachowanie porządku FIFO.
O wiadomościach, pomiędzy którymi nie zachodzi zależność przyczynowa mówi się, że są przyczynowo niezależne . Wiadomości przyczynowo niezależne mogą być dostarczone w dowolnej kolejności, a co za tym idzie – różne procesy mogą dostarczyć dwie (lub więcej) niezależne przyczynowo wiadomości w różnej kolejności. Wykonanie przykładu ilustrującego to pozostawia się Studentowi jako ćwiczenie.
Algorytm Przyczynowy-RB
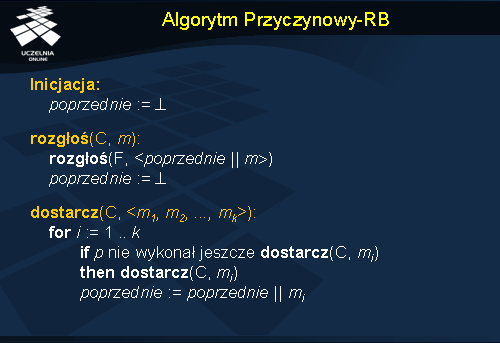
Algorytm Przyczynowy-RB realizuje niezawodne rozgłoszenie z zachowaniem dodatkowo przyczynowego uporządkowania wiadomości. Algorytm opiera się na algorytmie FIFO-RB.
Główna idea algorytmu polega na rozsyłaniu danej wiadomości wraz z całą sekwencją wiadomości ją poprzedzających , czyli wiadomości, które proces nadawcy dostarczył przed rozesłaniem swojej. Ponieważ sekwencja jest uporządkowana, kolejność wiadomości w niej odzwierciedla porządek przyczynowy.
W momencie dostarczenia danej wiadomości proces dołącza ją do sekwencji poprzednie . Następnie wykorzystuje tę sekwencję, gdy sam rozgłasza swoją wiadomość. Sekwencja ta niesie wówczas informację o wiadomościach, które proces nadawcy odebrał przed rozesłaniem własnej, a więc o wiadomościach poprzedzających przyczynowo rozsyłaną właśnie wiadomość. Sekwencja może zostać wyzerowana po rozgłoszeniu dowolnego komunikatu, ponieważ rozgłoszenie spowoduje przekazanie do wszystkich innych procesów informacji o uporządkowaniu komunikatów zaobserwowanym lokalnie.
/*sekwencja wiadomości, które p C-dostarczył od momentu swojego ostatniego C-rozgłoszenia*/
Całkowite uporządkowanie
Własność całkowitego uporządkowania oznacza, że wszystkie wiadomości są dostarczane do wszystkich procesów w identycznej kolejności. Algorytm niezawodnego rozgłoszenia RB, który dodatkowo zachowuje całkowite uporządkowanie wiadomości, nazywamy niezawodnym rozgłoszeniem atomowym, w skrócie rozgłoszeniem atomowym RB lub ARB, od angielskiej nazwy Atomic Reliable Broadcast.
Algorytmy czasowe
Algorytmy czasowe umożliwiają porządkowanie wiadomości w czasie rzeczywistym. Oparte są na założeniach o istnieniu maksymalnego, nieprzekraczalnego opóźnienia przy przesyłaniu wiadomości w systemie komunikacyjnym. Wyróżnia się dwa poziomy gwarancji algorytmów czasowych:
Uporządkowanie (ang. Timeliness ) w czasie rzeczywistym porządkuje wiadomości względem momentu ich wysłania mierzonego w czasie rzeczywistym , a więc bezwzględnym. Zrealizowanie go jest jednak możliwe tylko wtedy, gdy w systemie istnieje globalny zegar czasu rzeczywistego.
Uporządkowanie w czasie lokalnym porządkuje wiadomości względem lokalnego zegara u nadawcy . Każdej rozsyłanej wiadomości przypisywany jest przez nadawcę tzw. „stempel czasowy” (ang. Timestamp ), oznaczony na slajdzie przez ts(m ).
Algorytm Czasowy-RB
Powyższy algorytm będzie w definicji algorytmów oznaczany przez R?. Oparte na nim algorytmy gwarantujące dodatkowo własności uporządkowania FIFO oraz przyczynowego, będą oznaczane kolejno przez F? i C?.
Załóżmy, że podsieć komunikacyjna ma następujące właściwości:
1. Co najwyżej f procesów może ulec awarii.
2. Każde dwa poprawne procesy są połączone ścieżką długości co najwyżej d , złożonej wyłącznie z poprawnych
procesów i łączy komunikacyjnych.
3. Maksymalne opóźnienie wiadomości jest ograniczone stałą ?.
4. Czas wykonania lokalnej operacji jest zerowy.
Można udowodnić następujące twierdzenie :
Przy założeniach 1-4, algorytm niezawodnego rozesłania RB zachowuje ?-uporządkowanie (w czasie rzeczywistym ) ze stałą ? =( f+d ) ?.
Algorytm Czasowy-Atomowy-RB
W powyższym algorytmie wiadomość jest dostarczana w chwili ts(m )+?, czyli w chwili o ? późniejszej od wartości stempla czasowego wiadomości.
Algorytm zachowuje całkowite uporządkowanie wiadomości, ponieważ można uszeregować liniowo stemple czasowe wszystkich otrzymywanych wiadomości i w każdym procesie uszeregowanie to będzie jednakowe. Dodanie do stempli czasowych stałej ? pozostawi to uszeregowanie bez zmian.
Algorytm nie gwarantuje jednak zachowania uporządkowania przyczynowego. Wykonanie przykładu ilustrującego ten fakt jest pozostawione Studentowi jako ćwiczenie.
Algorytm Czasowy-Atomowy-Przyczynowy
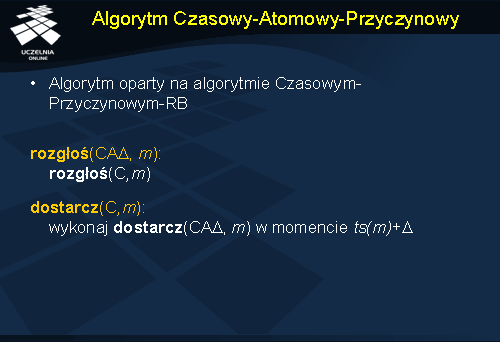
Powyższy algorytm zachowuje całkowite uporządkowanie wiadomości i jednocześnie uporządkowanie przyczynowe. Opiera się na działającym poniżej czasowym algorytmie przyczynowym-RB, gwarantującym uporządkowanie przyczynowe i dodatkowe gwarancje czasowe, i dodaje własność uporządkowania całkowitego. Skrót „CA” w nazwie algorytmu pochodzi od pełnej angielskiej nazwy Causal Atomic , oznaczającej „przyczynowy-atomowy”.
Należy zauważyć, że algorytm bazowy, czasowy przyczynowy-RB, jest po prostu algorytmem przyczynowym przedstawionym wcześniej, lecz bazującym na czasowym algorytmie RB.
Relacje pomiędzy algorytmami
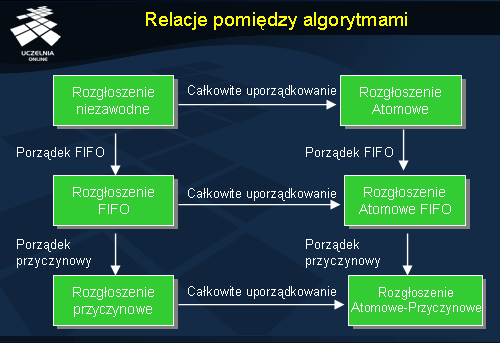
Rysunek ukazuje, jak można w sposób warstwowy konstruować algorytmy dostarczające coraz bardziej wymagających gwarancji.
Podstawowy mechanizm rozgłoszenia niezawodnego może zostać wykorzystany jako podstawa dla wszystkich pozostałych. Algorytm z dodatkową własnością uporządkowania FIFO może z kolei posłużyć jako podstawa do implementacji algorytmu z uporządkowaniem przyczynowym. Ponadto, z prawej strony pokazano, że niezależnie od tych dwóch własności dany algorytm może zostać wyposażony w gwarancję całkowitego uporządkowania.
Literatura