Zarządzenie pamięcią
Wstęp
Dynamiczna alokacja pamięci to bardzo ważny element języka C. W C do
przydziału i zwolnienia pamięci służą odpowiedno funkcje malloc
(i jego "kuzyni") i free. W C++ są one również dostępne, ale
używane są raczej wyrażenia
new i delete. Ta zmiana ma poważną przyczynę: te wyrażenia
robią więcej niż tylko przydzielanie lub zwalnianie pamięci. Wyrażenie
new tworzy nowy obiekt, a więc nie tylko przydziela pamięc, ale
również inicjalizuje go, używając odpowiedniego konstruktora. Wyrażenie
delete niszczy obiekt, wywołując jego destruktor i dopiero potem
zwalnia zajętą przez niego pamięć. W tym wykładzie pokażę, co tak
naprawdę się dzieje, gdy dynamicznie tworzymy lub niszczymy obiekty.
Wyrażenia new i delete posługują się systemowymi alokatorami
i dealokatorami pamięci. C++ daje nam możliwość
wykorzystania w tym celu własnych implementacji.
Napisanie jednak bardziej wydajnego alokatora
pamięci niż alokator standardowy nie jest łatwe.
Można jednak próbować zwiększyć wydajność przydzielania i zwalniania
pamięci w sytuacjach szczególnych, np. jeśli
używamy dużej ilości małych obiektów o stałym rozmiarze, które muszą
być dynamicznie tworzone i niszczone. Pod koniec wykładu podamy prosty
schemat obsługi pamięci mający zastosowanie w takiej sytuacji.
new
Przyjrzyjmy się najpierw dokładnie procesowi tworzenia pojedynczego, nowego
obiektu za pomocą wyrażenia new:
X *p = new X inicjalizator;lub
X *p = new (lista_argumentow) X inicjalizator;
Druga forma jest nazywana z przyczyn historycznych "placement new"
(pochodzenie tej nazwy wyjaśnię poniżej); inicjalizator
może być dowolnym wyrażeniem inicjalizującym, np.:
X *p1 = new X; X *p2 = new X(); X x,y; X *p3 = new X = x; X *p4 = new X(y); X *p5 = new X(0);
Oczywiście zakładamy istnienie odpowiednich konstruktorów.
Przydział pamięci
Najpierw przydzielana jest "goła" (raw) pamięć. Służy do tego
funkcja przydziału pamięci (alokator) operator new():
void *tmp = operator new(sizeof(X));
lub
void *tmp = operator new(sizeof(X),lista_argumentow);
jeśli użyliśmy formy placement. Nazwa placement pochodzi od operatora
new dostarczanego w bibliotece standardowej, który przyjmuje drugi
argument typu void *:
void* operator new(std::size_t size, void* ptr) throw() {return ptr;};
Operator ten nie przydziela żadnej pamięci tylko zwraca wskaźnik
ptr. Jego wywołanie nie może się nie powieść, dlatego nie rzuca
żadnych wyjątków. Ta forma operatora służy do
umieszczania (placement) obiektu w
zadanym obszarze pamięci:
void *p =malloc(sizeof(X)); X *px=new (p) X;
stąd jego nazwa.
Środowisko C++ dostarcza jeszcze dwu wersji globalnych funkcji
operator new():
void* operator new(std::size_t size) throw(std::bad_alloc); void* operator new(std::size_t size, std::nothrow_t) throw();
ale użytkownik może podać własne definicje, zarówno
globalne, jak i dla pojedynczych klas. Odpowiednia funkcja operator new jest najpierw wyszukiwana w klasie X, a następnie w
przestrzeni globalnej. Jeśli nie znajdzie się definicja odpowiadająca
podanym argumentom, to wystąpi błąd kompilacji. Np. jeśli zażądamy
stworzenia obiektu wyrażeniem:
X *p = new X;to kompilator będzie szukał funkcji:
X::operator new(size_t);
a w drugiej kolejności:
void *tmp =::operator new(sizeof(X));
Wyrażenie
X *p = new (3.15) X;
spowoduje poszukiwanie funkcji:
X::operator new(size_t,double);
lub
::operator new(size_t,double);
Pierwszy argument każdej funkcji operator new musi być typu
size_t i przekazywany jest przez niego rozmiar żądanego obszaru
pamięci.
Każda funkcja operator new zwraca void *. W przypadku
powodzenia zwracany jest wskaźnik do przydzielonego obszaru pamięci:
void *p = operator new(1000);
W przypadku niepowodzenia operator new może rzucić wyjątek
std::bad_alloc lub zwrócić wskaźnik zerowy.
Tworzenie obiektu
Jeśli przydział pamięci powiedzie się, tzn. operator new zwróci
niezerowy wskaźnik, to następuje wywołanie konstruktora klasy X
w celu stworzenia obiektu,
który jest umieszczany w przydzielonej pamięci. Np:
X *p = X(1);
spowoduje wywołanie konstruktora:
X::X(int);
jeśli takowy istnieje. Jeśli konstrukcja się powiedzie (nie rzuci
wyjątku), to proces się kończy. Jeśli jednak wywołany konstruktor
rzuci wyjątek, który zostanie złapany, to wyrażenie delete
postara się zwolnić przydzieloną pamięć w "trybie awaryjnym".
Awaryjne zwolnienie pamięci
W ramach takiej obsługi przerwania, zwalnianie pamięci przydzielonej przez operator new odbywa sie za pomocą odpowiadajacej mu wersji operator delete.
void operator delete(void *p,lista_argumentow) throw();
operator delete odpowiada wersji operatora new z taką sama listą argumentów. Jeśli lista argumentów jest niepusta, to
taki operator nazywamy placement delete.
Przy wywoływaniu placement delete, przekazywana mu jest lista dodatkowych
argumentów, identyczna z listą dodatkowych argumentów operatora placement new,
który pamięć przydzielił.
Biblioteka C++ dostarcza globalnych implementacji operatorów
delete, odpowiadających trzem wspomnianym powyżej operatorom
new, ale można też dodawać własne definicje, zarówno w klasie jak
i w przestrzeni globalnej. Jeśli kompilator nie znajdzie żadnej
odpowiedniej definicji operator delete, to żadna funkcja
zwalniająca nie zostanie wywołana.
Rozważmy następujący przykład:
struct X { X(int); /* rzuca wyjątek typu int*/ void *operator new(size_t) throw(std::bad_alloc); void *operator delete(void *p) throw(); }
Wyrażenie:
try { X *p = new X(1); } catch(int){};
spowoduje wywołanie:
void *tmp=X::operator new(sizeof(X)); X::operator delete(tmp);
Dodanie do klasy X dwu operatorów:
void *operator new(size_t,double) throw(std::bad_alloc); void *operator delete(void *p,double) throw();
spowoduje, że wyrażenie:
try { X *p = new (3.14) X(1); } catch(int){};
wywoła:
void *tmp=X::operator new(sizeof(X),3.14); X::operator delete(tmp,3.14);
Tę logikę zaburza trochę fakt istnienia wyróżnionej wersji funkcji
operator delete. Są to składowe klas posiadające drugi parametr
typu size_t:
void X::operator delete(void *p,size_t size);
Jeśli klasa nie posiada jednoargumentowego operatora delete, to
powyższy operator jest traktowany jak jednoargumentowy (non
placement). Za drugi argument podstawiany jest automatycznie rozmiar
zwalnianego obiektu. Rozważmy, więc teraz taki przykład:
struct X { X(int); /* rzuca wyjątek typu int*/ void *operator new(size_t) throw(std::bad_alloc); void *operator delete(void *p,size_t) throw(); }
Wyrażenie:
try { X *p = new X(1); } catch(int){};
wywoła:
void *tmp=X::operator new(sizeof(X)); X::operator delete(tmp,sizeof(X));
a wyrażenie:
try { X *p = new (3) X(1); } catch(int){};
wywoła:
void *tmp=X::operator new(sizeof(X),3); X::operator delete(tmp,3);
Proszę zwrócić uwagę na różnicę w wartości drugiego argumentu przekazanego
do operator delete.
delete
Stworzony dynamicznie obiekt niszczymy wyrażeniem
delete p;które najpierw wywołuje destruktor klasy X:
p->~X();
Jeśli to wywołanie się nie powiedzie (zostanie rzucony wyjątek) to mamy
kłopot, bo nie zostanie wywołany operator delete w celu
zwolnienia pamięci. Jest to kolejny powód aby nie rzucać wyjątków z
destruktora. Poniższy programik ilustruje ten problem, doprowadzając
do szybkiego wyczerpania pamięci:
class X { char a[100000]; public: ~X() {throw 0;} }; main() { while(1){ X *p = new X; try { delete p; } catch(int) {}; } }
Jeśli jednak nic złego się nie wydarzy, to po wywołaniu destruktora
przydzielona pamięć zostaje zwolniona za pomocą funkcji operator delete(). O zwalnianiu pamięci dużo już napisałem przy omawianiu wyrażenia new. W przypadku wyrażenia delete dzieje się to jednak trochę inaczej. Wyrażenie delete używa do zwolnienia pamięci tylko funkcji operator delete() niebędących typu
placement, tzn. posiadające jeden lub ewentualnie dwa argumenty:
void operator delete(void p) throw(); void operator delete(void p,size_t) throw();
Jest to niezależne od tego jaki operator new został użyty do
przydzielenia pamięci. Czyli jeśli zdefiniujemy, np.:
struct X { X(int); /* rzuca wyjątek typu int*/ void *operator new(size_t) throw(std::bad_alloc); void *operator new(size_t,size_t) throw(std::bad_alloc); void *operator new(size_t,double) throw(std::bad_alloc); void *operator delete(void *p,size_t) throw(); void *operator delete(void *p,double) throw(); }
to wyrażenia:
X p1 = new X; X p2 = new (1) X; X p3 = new (3.14) X; delete p3; delete p2; delete p1;
spowodują wywołanie:
void *tmp1 = X::operator new(sizeof(X)); void *tmp2 = X::operator new(sizeof(X),1); void *tmp3 = X::operator new(sizeof(X),3.14); X::operator delete(tmp3,sizeof(X)); X::operator delete(tmp2,sizeof(X)); X::operator delete(tmp1,sizeof(X));
operator new
Z powyższego opisu widać, że wpływ na proces dynamicznego tworzenia
obiektu możemy mieć tylko poprzez własne definicje przydzielającego
pamięć operatora new. Zanim jednak napiszemy własną wersję
takiego operatora, przyjrzymy się dokładniej właściwościom
standardowego operatora new.
Jak już wiemy funkcja operator new musi posiadać co najmniej jeden
argument typu size_t. Standardowy operator new posiada
tylko ten jeden argument:
void* operator new(std::size_t size) throw(std::bad_alloc);
Jeśli wszystko pójdzie dobrze, to operator new zwraca wskaźnik
do obszaru pamięci o rozmiarze co najmniej size; jeśli przydział
się nie powiedzie, to rzuca wyjątek std::bad_alloc.
Dokładniej rzecz biorąc operator new rzuca wyjątek tylko wtedy
jeśli nie ustawiona jest funkcja obsługi błędów. Do jej ustawiania
służy funkcja:
namespace std { typedef void (new_handler*)(); new_hadler set_new_handler(new_handler f); }
Funkcja set_new_handler ustawia nową funkcję obsługi błędów i
zwraca wskaźnik do poprzedniej funkcji obsługi lub null, jeśli
funkcja nie była ustawiona. Przekazanie wskaźnika null jako
argumentu powoduje, że nie będzie ustawiona żadna funkcja obsługi. To co
się dzieje wewnątrz operator new wygląda mniej wiecej tak:
while(1) { void *p = przydziel pamiec; if(proba powiodla sie) return p; new_handler handler = set_new_handler(0); set_new_handler(handler); if(handler) handler(); else throw std::bad_alloc(); }
Funkcja handler musi więc uzyskać więcej pamięci, rzucić
wyjątek albo przerwać program. Może też ustawić inną funkcję obsługi,
inaczej program będzie się wykonywał w niekończącej się pętli.
nothrow
Trzecia forma operatora new dostarczonego w bibliotece
standardowej to wersja no_throw. Operator new nie musi
rzucać wyjątku w razie niepowodzenia, ale musi wtedy zwrócić wskaźnik
zerowy (null). Aby wywołać tę wersję operatora new korzystamy
z tego, że posiada ona drugi argument typu nothrow_t.
void* operator new(std::size_t size, const std::nothrow_t&) throw();
W tym celu zdefiniowana została globalna stała typu std::nothrow_t:
namespace std { struct nothrow_t {}; extern const nothrow_t nothrow; }
Wersję nothrow używamy więc następująco:
X *p=new (std::nothrow) X; if(!p) {...};
operator delete
Operator delete musi posiadać co najmniej jeden parametr będący
wskaźnikiem na zwalniany obszar pamięci:
void operator delete(void* ptr) throw();
Może to być wskaźnik zerowy, wtedy operator new nic nie robi.
Operator delete nie rzuca wyjątków.
Jak już opisałem to powyżej, dwuargumentowa wersja będąca składową klasy:
void operator delete(void* ptr) throw();
zachowuje się, w większości przypadków jak wersja jednoargumentowa i drugi argument zostaje automatycznie inicjalizowany rozmiarem zwalnianej pamięci.
Tablice
W powyższej dyskusji ograniczyłem się do tworzenia pojedynczych obiektów. C++ zezwala na tworzenie tablic obiektów:
X *px = new X[10];
Powyższe wyrażenie przydziela pamięć na 10 obiektów klasy X i
tworzy je za pomocą konstruktorów standardowych.
W przypadku niepowodzenia konstrukcji niszczy skonstruowane obiekty (jeśli takowe istnieją) i zwalnia pamięć. Alokacja gołej pamięci jest dokonywana poprzez:
void * operator new[] {size_t);
i zwalniana za pomocą:
void * operator new[] {size_t);
Przeładowywanie operatorów new i delete
Po tym przydługim, technicznym wprowadzeniu, możemy wreszcie pokusić
się o napisanie własnego operatora new lub przeładowanie
istniejącego. Do wyboru mamy wersję globalną lub funkcję składową
jakiejś klasy. Globalny alokator pamięci to poważna sprawa: dotyczy
działania całego programu i musi przydzielać pamięć dowolnych
rozmiarów. Trudno będzie pod tym względem pobić działanie standardowej
wersji operator new. Dlatego częściej będziemy chcieli definiować
operatory new we własnych klasach.
Na co musimy zwrócić w takim przypadku uwagę? Mam
nadzieję, że przekonałem Państwa, że do każdego operatora new
należy dopisać odpowiednią wersję operatora delete, inaczej nie
będziemy w stanie zapewnić bezpiecznego zachowania w sytuacji, w
której zostanie rzucony wyjątek z konstruktora.
Musimy też uważać na jawne zwalnianie pamięci. Jeśli w jednej klasie
zdefiniujemy kilka operatorów placement new, to nie będziemy
mogli ich rozróżnić w poleceniu delete!.
Musimy też zadbać aby operator new albo rzucał wyjątek, albo
zwracał wskaźnik pusty w razie niemożności przydziału pamięci. W
innym przypadku wyrażenie new nie rozpozna, że przydział pamięci
się nie powiódł i będzie próbować tworzyć obiekt w nieprzydzielonej
pamięci.
A co z obsługą new_handler? W zasadzie możemy jej nie
implementować i jeśli robimy to tylko na własny użytek, to pewnie nic
złego się nie stanie. Ale jeśli operator new jest częścią
zewnętrznego interfejsu klasy, to prędzej czy później któryś z
użytkowników może się postarać skorzystać z set_new_handler().
W końcu jeżeli nazywamy naszą funkcję operator new, a nie np.
allocate(), to sugerujemy, że będzie ona miała funkcjonalność
operator new. Zwykle robimy to po to, aby skorzystać z
istniejącego już kodu, który używa wyrażeń new. Jeśli chcemy
tworzyć obiekty i przydzielać pamięć, ale nie zależy nam na
interfejsie new, lepiej nazwać nasze alokatory inaczej.
Memory pool
Jak już sygnalizowałem na wstępie, konieczność zdefiniowania własnego
operatora new pojawia się, gdy chcemy uzyskać wydajność lepszą
niż oferowana przez standardowy operator new. Rozważmy więc
sytuację, kiedy używamy wielu małych przedmiotów o takim samym
rozmiarze. Typowy przykład to inteligentne wskaźniki. W jaki więc
sposób moglibyśmy wydajnie przydzielać i zwalniać pamięć dla takich obiektów?
Jednym z prostszych sposobów jest przydzielenie za pomocą stadardowego alokatora pewnej ilości pamięci, a następnie przydzielanie z niej po kawałku pamięci na pojedyncze obiekty.
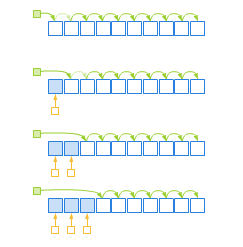
 Rysunek 14.1. Działanie zasobnika pamięci.
Rysunek 14.1. Działanie zasobnika pamięci.
Dokładniej wygląda to tak (zob. animacja 14.1): przydzielamy
obszar pamięci mogący pomieścić N kawałków żądanego przez nas
rozmiaru. Na początku wszystkie te kawałki łączymy w listę. Ponieważ na
liście bedą się znajdowały tylko kawałki nieprzydzielonej pamięci,
możemy umieścić wskaźnik do następnego kawałka na liście w samym
kawałku. Nasz alokator nie ma więc żadnego narzutu pamięci poza
wskaźnikiem do pierwszego elementu listy (głowa).
Kiedy potrzebujemy przydzielić pamięć, to usuwamy z listy jej pierwszy element i zwracamy wskaźnik do niego. Kiedy chcemy zwolnić pamięć przyłączamy zwalniany kawałek na początku listy. Obie te operacje są bardzo szybkie. Jeśli mamy wystarczająco dużo pamięci, możemy zrezygnować ze zwalniania jej pojedynczo, tylko zwolnić cały obszar naraz, gdy nie będzie nam już potrzebny.
Kiedy będziemy potrzebowali więcej kawałków niż może ich pomieścić nasz obszar, możemy przydzielić nowy.
Napisanie klasy obsługującej taki schemat pozostawiam jako ćwiczenie.
Tutaj wykorzystam gotową klasę pool dostarczaną w bibliotece boost::pool.
Ewidentnie taki schemat nie nadaje się do implementacji globalnej wersji
operator new, która przydziela pamięć dowolnych rozmiarów.
Idealnie pasuje jednak do klasowego operatora new.
Deklarujemy więc:
#include<boost/pool/pool.hpp> struct X { int _val; char c[1000];/* to tylko zwiększa rozmiar klasy*/ static boost::pool<> pool; public: X(int i=0):_val(i) {}; operator int() {return _val;}; void *operator new(size_t) throw(std::bad_alloc); void operator delete(void *) throw(); };
( Źródło: X_new.h)
Składowa pool jest składową statyczną, ponieważ musi istnieć
niezależnie od obiektów klasy. Podobnie operatory new i
delete automatycznie są traktowane jako metody statyczne.
Ponieważ składowe statyczne klasy są inicjalizowane na zewnątrz,
dodajemy do kodu linijkę:
boost::pool<> X::pool(sizeof(X));
która tworzy obiekt X::pool służący do przydzielania pamięci w kawałkach
po sizeof(X) bajtów.
Następnie definiujemy operator new:
void * X::operator new(size_t size) throw(std::bad_alloc) { while(1) { void *p = pool.malloc(); if(p) return p; std::new_handler handler = std::set_new_handler(0); std::set_new_handler(handler); if(handler) handler(); else throw std::bad_alloc(); } }
( Źródło: X_new.cpp)
Sam przydział pamięci jest najłatwiejszy: korzystamy z gotowej
funkcji malloc() z klasy boost::pool<>. Reszta kodu
implementuje zachowanie się operatora w przypadku braku pamięci, co
funkcja _pool.malloc() sygnalizuje poprzez zwrócenie wskaźnika
zerowego.
Operator delete jest dużo prostszy:
void X::operator delete(void *p) throw() { if(p) pool.free(p); }
Alokatory
Trudno omawiać zarządzanie pamięcią w wykładzie dotyczącym programowania uogólnionego i nie wspomnieć o alokatorach STL. W poprzedniej części wykładu używałem słowa alokator na określenie każdej funkcji przydzielającej pamięć. W STL alokator jest konceptem i oznacza klasy, których obiekty służą do przydzielania pamięci dla standardowych kontenerów. Biblioteka C++ dostarcza standardową implementację szablonu alokatora, której konkretyzacje przekazywane są jako domyślny drugi lub trzeci argument szablonów kontenerów:
namespace std { template<class T, class Allocator=allocator<T> > class vector; template<class T, class Compare = less<T>, class Allocator = allocator<T>> class set; }
Dlatego można używać kontenerów i nie wiedzieć nawet, że alokatory istnieją.
Wymagane elementy szablonu kontenera opiszę na przykładzie możliwej implementacji alokatora standardowego allocator.h:
template <class T> class allocator {...};
Alokator jest szablonem przyjmujacym jako argument typ obiektów, dla których będzie przydzielał pamięć. Ponieważ parametrem szablonu kontenera jest typ, a nie szablon, można by sądzić, że alokator klasą być nie musi, bo możemy tworzyć konkretne alokatory dla konkretnych typów, np.:
vector<int,alokator_int> v;
Alokator musi jednak być szablonem, bo wewnątrz kontenera może zajść
potrzeba przydzielenia pamięci dla obiektu innego typu niż typ
przechowywany T. Dzieje się tak w przypadku kontenerów opartych na
węzłach, takich jak listy czy kontenery asocjacyjne. Taki kontener
musi przydzielić pamięć na węzęł, a nie na element typu T. Żeby
móc to zrobić alokator posiada wewnętrzną strukturę:
template <class U> struct rebind { typedef pool_allocator U other; };
Kontener może z niej korzystać następująco:
typedef typename allocator<T>::rebind<node<T> >::other node_allocator;
Obiekty klasy node_allocator przydzielają pamięć na obiekty klasy
node<T>, a nie T.
Alokator definiuje szereg typów stowarzyszonych:
public: typedef T value_type; typedef value_type* pointer; typedef const value_type* const_pointer; typedef value_type& reference; typedef const value_type& const_reference; typedef size_t size_type; typedef size_t difference_type;
i operator zwracający adres elementu typu T:
pointer address(reference x) const { return &x; } const_pointer address(const_reference x) const { return x; };
Miało to umożliwić używanie niestandardowych typów wskaźnikowych i referencyjnych. W praktyce te typy i funkcje muszą być zdefiniowane dokładnie tak jak powyżej (zob. S. Meyers "STL w praktyce. 50 sposobów efektywnego wykorzystania" oraz N.M. Josuttis "C++ Biblioteka Standardowa. Podręcznik programisty").
Kontener używa obiektów klasy allocator, wobec czego musimy mieć
możność tworzenia i niszczenia ich:
pool_allocator() {} pool_allocator(const pool_allocator&) {} ~pool_allocator() {}
Ważnym ograniczeniem narzuconym przez standard C++ jest wymaganie, aby każde dwa obiekty alokatora tej samej klasy były równoważne. Rownoważność oznacza, że pamięc przydzielona przez jeden obiekt alokatora może być zwolniona przez drugi. W naszym przypadku alokator nie posiada żadnego stanu i jego konstruktory i destruktor nic nie robią, zatem ten warunek jest spełniony. Alokator nie musi posiadać operatora przypisania, więc uniemożliwimy jego użycie:
private: void operator=(const pool_allocator&);
Dochodzimy wreszcie do funkcji, które zarządzają pamięcią. Funkcja:
pointer allocate(size_type n, const_pointer = 0) { return static_cast<pointer>(::operator new(n)); };
przydziela pamięć dla n elementów typu T. Pamięć nie jest
inicjalizowana. Proszę zwrócić uwagę, że w przeciwieństwie do
operator new czy malloc, allocate zwraca wskaźnik
T *, a nie void *. Drugi parametr funkcji allocate może
być użyty przez bardziej wyrafinowane schematy przydziału pamięci.
Tworzeniem obiektu wewnątrz przydzielonej pamięci zajmuje się funkcja
vvoid construct(pointer p, const value_type& x) { new(p) value_type(x); }
korzystająca ze standardowego placement new. Funkcja:
void deallocate(pointer p, size_type n) throw() { ::operator delete(p); }
zwalnia pamięć wskazywaną przez wskaźnik p.
Funkcja deallocate() nie wywołuje destruktora. Robi to funkcja:
void destroy(pointer p) { p-> ~value_type(); }
Na koniec została pomocnicza funkcja:
size_type max_size() const { return static_cast<size_type>(-1) / sizeof(T); }
która zwraca największą wartość możliwą do przekazania do funkcji
allocate. Nie oznacza to jednak, że przydział tej pamięci musi
się powieść.
Koncept alokatora wymaga jeszcze dwu operatorów testujących równoważność obiektów alokatora. Ponieważ kontenery wymagają, aby każde dwa obiekty były równoważne, te operatory zdefiniowane są następująco:
template <class T> inline bool operator==(const allocator<T>&, const allocator<T>&) { return true; } template <class T> inline bool operator!=(const allocator<T>&, const allocator<T>&) { return false; }
Na koniec zabezpieczmy się jeszcze tylko na wypadek możliwości
skonkretyzowania szablonu allocator<void> poprzez odpowiednią
specjalizację:
template<> class allocator<void> { typedef void value_type; typedef void* pointer; typedef const void* const_pointer; template <class U> struct rebind { typedef allocator<U> other; }; };
| Załącznik | Wielkość |
|---|---|
| X_new.cpp | 470 bajtów |
| X_new.h | 326 bajtów |