Wyznacznik
Odwzorowania wieloliniowe
Niech \(V\) będzie \(n\)-wymiarową przestrzenią wektorową nad ciałem \(\mathbb K\) o charakterystyce różnej od 2. Niech dane będzie odwzorowanie \(\phi :V^k\longrightarrow \mathbb K\). Mówimy, że odwzorowanie \(\phi\) jest k-liniowe, jeśli dla każdego \(i= 1,...,k\) oraz dla dowolnie ustalonych wektorów \(v_1,...,v_{i-1},v_{i+1},..., v_k\) odwzorowanie
\(V\ni v\longrightarrow \phi (v_1,...,v_{i-1},v,v_{i+1},..., v_k)\in \mathbb K\)
jest liniowe. Na przykład, odwzorowanie \(\mathbb R ^k\ni (a_1,...,a_k)\longrightarrow a_1...a_k\in \mathbb R\) jest \(k\)-liniowe.
Zbiór wszystkich odwzorowań \(k\)-liniowych \(\phi :V^k\longrightarrow \mathbb K\) oznaczmy przez \({\cal L} ^k(V)\). W naturalny sposób (tak jak w Przykładzie 7. Wykładu I) zbiór ten
jest wyposażony w strukturę przestrzeni wektorowej.
Mówimy, że odwzorowanie \(\phi\) jest antysymetryczne, jeśli dla
każdej permutacji \(\rho\) ciągu \(1,...,k\) zachodzi wzór
\(\phi (v_{\rho (1)}, ..., v_{\rho (k)}) = sgn \,\rho\ \phi (v_1,...,v_k),\)
gdzie \( sgn\ \rho\) oznacza znak permutacji \(\rho\). Podobnie definiuje się odwzorowanie symetryczne. Mianowicie, \(\phi\) jest symetryczne, jeśli dla każdej permutacji \(\rho\) zachodzi równość.
\(\phi (v_{\rho (1)}, ..., v_{\rho (k)}) = \phi (v_1,...,v_k).\)
Wyżej wspomniane mnożenie liczb rzeczywistych jest k-liniowe symetryczne.
W niniejszym wykładzie odwzorowania antysymetryczne będą odgrywać główną rolę. Zacznijmy od następującego lematu.
Lemat 1.1
Dla odwzorowania \(k\)-liniowego \(\phi\) następujace warunki są równoważne.
- \(\phi\) jest antysymetryczne,
- \(\phi (v_1,...,v_k)=0\) dla dowolnych wektorów \(v_1,...,v_k\in V\) takich, że dwa spośród \(v_1,...,v_k\) są jednakowe.
- Jeśli \(v_1,...,v_k\) są liniowo zależne, to \(\phi (v_1,..., v_k)=0\).
Dowód
Załóżmy 1. Niech wektory \(v_iv_j\) będą jednakowe w ciągu wektorów \(v_1,...,v_k\). Niech \(\rho\) oznacza permutację, która
zamienia \(i\) na \(j\). Znak tej permutacji jest równy \(-1\). Po zastosowaniu tej permutacji ciąg wektorów \(v_1,...,v_k\) nie ulega zmianie. Wobec tego \(\phi (v_{\rho (1)},...,v_{\rho (k)})=\phi (v_1,...,v_k)\). Z drugiej strony
\(\phi (v_{\rho (1)},...,v_{\rho (k)})=- \phi (v_ 1,...,v_k).\)
Dodajmy do obu stron tej równości \(\phi (v_{\rho (1)},...,v_{\rho (k)})=\phi (v_1,...,v_k)\). Dostajemy równość
\((1+1) \phi (v_1,...,v_k)=0.\)
Wynika stąd, że \(\phi (v_1,...,v_k)=0\), bo ciało \(\mathbb K\) ma charakterystykę różną od 2.
Odwrotnie, jeśli \(\phi\) spełnia warunek 2), to dla każdych wektorów \(v_1,..., v_k\) i dla każdych \(i< j\), \(i,j=1,...,k\) mamy
\(0=\phi (v_1,...,v_{i-1},v_i +v_j, v_{i+1},..., v_{j-1}, v_{i}+v_{j}, v_{j+1},...,v_k).\)
Stąd, że \(\phi\) spełnia warunek 2. oraz z \(k\)-liniowości odwzorowania \(\phi\) dostajemy
\(\phi (v_1,...,v_{i-1}, v_j,v_{i+1},...,v_{j-1},v_i, v_{j+1},..., v_k)=-\phi (v_1,..., v_k).\)
Ponieważ każda permutacja jest złóżeniem pewnej liczby \(s\) transpozycji i znak permutacji jest równy \((-1)^s\), więc \(\phi\) jest antysymetryczne.
Załóżmy, że spełniony jest warunek 2. Jeśli ciąg \(v_1,..., v_k\)
jest liniowo zależny, to pewien wektor z tego ciągu jest kombinacją liniową pozostałych wektorów. Korzystając z \(k\)-liniowości \(\phi\) i z warunku 2. dostajemy natychmiast, że \(\phi (v_1,...,v_n )=0\). Na koniec, załóżmy 3). Jeśli, któreś wektory w ciągu \(v_1,..., v_n\) są równe, to ciąg \(v_1,..., v_n\) jest liniowo zależny , a zatem \(\phi (v_1,...,v_n)=0\). Dowód lematu jest zakończony.
Jest oczywiste, że suma odwzorowań \(k\)-liniowych antysymetrycznych
jest odwzorowaniem \(k\)-liniowym antysymetrycznym i odwzorowanie
\(k\)-liniowe antysymetryczne pomnożone przez skalar jest też antysymetryczne. A zatem ogół odwzorowań antysymetrycznych stanowi podprzestrzeń przestrzeni \({\cal L} ^k(V)\). Oznaczmy tę podprzestrzeń przez \({\cal L} ^k_a (V)\). Elementy przestrzeni
\({\cal L}^k_a(V)\) nazywamy też \(k\)-formami na przestrzeni \(V\). Choć teoria \(k\)-form jest ważna i interesująca, na potrzeby naszego wykładu zajmiemy się tylko szczególnymi przypadkami, tzn. szczególnymi przypadkami \(k\). Po pierwsze, znamy już przestrzeń 1-form. Przestrzenią tą jest przestrzeń dualna \(V^*\), 1-formami odwzorowania liniowe określone na \(V\) i o wartościach w ciele \(\mathbb K\).
Zajmiemy się teraz \(n\)-formami, gdzie \(n=\dim V\).
Niech \(e_1,...,e_n\) będzie bazą przestrzeni wektorowej \(V\) i \(\omega \in {\cal L}\). Niech \(v_1,..., v_n\in V\). Każdy z tych wektorów przedstawimy jako kombinację liniową wektorów bazy. A zatem \(\displaystyle v_j=\sum _{i=1}^n a_{ij}e_i\) dla każdego \(j=1,...,n\). Korzystając z Lematu 1.1 otrzymujemy następujące równości
\(\begin{aligned}\omega (v_1,...,v_n)&=\omega (\sum _{{i_1}=1}^n{a_{i_11}} {e_{i_1}},...,\sum _{{i_n}=1}^n{a_{i_nn}}e_{i_n}) \\ &= \sum _{{i_1},...,{i_n}=1}^n {a_{{i_11}}}\cdot\cdot\cdot {a_{{i_nn}}}\omega ({e_{i_1}},...,{e_{i_n}})\\ &= \sum _{\small{\begin{array} {l} \ \ \ \ {i_1},...,{i_n}\\ \ { i_a}\ne {i_b} \ {\rm dla}\ a\ne b \end{array} }} {a_{i_1 1}}\cdot\cdot\cdot{a_{i_n n}}\omega ({e_{i_1}},...,{e_{i_n}}) \end{aligned}\)
Ponieważ ciąg różnowartościowy \(i_1,...,i_n\) jest permutacją ciągu
\(1,...,n\), więc dostajemy
\(\begin{aligned}\omega (v_1,...,v_n)&=\sum _{\rho\in{\cal S}_n} {a_{\rho (1)1}}\cdot\cdot\cdot{a_{\rho (n)n}} \omega (e_{\rho (1)},..., e_{\rho (n)})\\ &=\sum _{\rho\in{\cal S}_n} sgn\, \rho \,{a_{\rho (1)1}}\cdot\cdot\cdot{a_{\rho (n)n}} \omega (e_1,..., e_n)\\ &= \omega (e_1,...,e_n) \left (\sum _{\rho\in{\cal S}_n} sgn\, \rho \, {a_{\rho (1)1}}\cdot\cdot\cdot{a_{\rho (n)n}}\right ), \end{aligned}\)
gdzie \({\cal S} _n\) oznacza zbiór wszystkich permutacji ciągu \(1,...,n\). Ostatecznie, dla każdego \(\omega \in{\cal L}\), zachodzi wzór
\(\displaystyle \omega (v_1,...,v_n)=\omega (e_1,...,e_n) \left (\sum _{\rho\in{\cal S}_n} sgn\, \rho \ {a_{\rho (1)1}}\cdot\cdot\cdot{a_{\rho (n)n}}\right )\) (1.1)
Skalar
\(\displaystyle \sum _{\rho\in{\cal S}_n} sgn\, \rho \ {a_{\rho (1)1}}\cdot\cdot\cdot{a_{\rho (n)n}}\)
nie zależy od \(\omega\). A zatem przestrzeń \(\mathcal L_{a}^{n}\) jest 1-wymiarowa i każda \(n\)-forma jest wyznaczona jednoznacznie przez zdefiniowanie \(\omega (e_1,..., e_n)\) dla dowolnie wybranej bazy \(e_1,..., e_n\).
Wyznacznik macierzy. Podstawowe własnosci
W przypadku, gdy \(V=\mathbb K ^n\) mamy bazę kanoniczną \(e_1,...,e_n\) tej przestrzeni. Każda \(n\)-forma na \(\mathbb K^n\) może być zadana na bazie kanonicznej.
Rozważmy teraz przestrzeń \(M(n,n;\mathbb K)\). Przypomnijmy, że jest to przestrzeń wszystkich macierzy kwadratowych o wymiarach \(n\) na
\(n\) i o wyrazach w ciele \(\mathbb K\). Niech \(A\in M(n,n;\mathbb K)\). Niech \(A_1,..., A_n\) oznaczają kolumny macierzy. Kolumny są wektorami przestrzeni \(\mathbb K ^n\). Macierz możemy traktować jako ciąg kolumn \(A_1,...,A_n\). Na podstawie wyżej przeprowadzonych rozważań, możemy stwierdzić prawdziwość następującego twierdzenia
Twierdzenie 2.1
Istnieje dokładnie jedno odwzorowanie \(n\)-liniowe antysymetryczne
\(\omega _o:M(n,n;\mathbb K)\ni A\longrightarrow \omega_o (A_1,...,A_n)\in \mathbb K\)
takie, że \(\omega _o(e_1,...,e_n)=1\), gdzie \(e_1,...,e_n\) jest bazą kanoniczną przestrzeni \(\mathbb K ^n\).
Odwzorowanie \(\omega _o\) nazywa się wyznacznikiem i oznacza symbolem \(\det\).
Symbol \(\det A\) oznacza wartość odwzorowania \(\det\) na ciągu kolumn \(A_1,...,A_n\) macierzy \(A\).
Podkreślamy, że wyznacznik macierzy definiuje się tylko dla macierzy
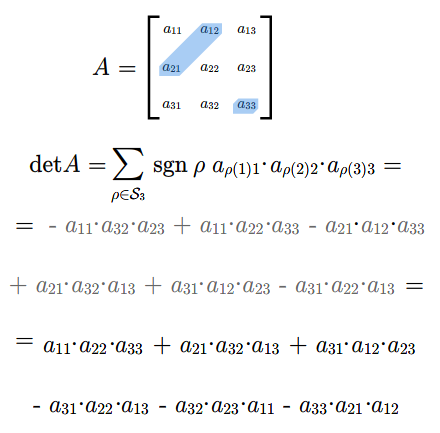
kwadratowych. Na podstawie formuły (1.1) otrzymujemy natychmiast następujący wzór na wyznacznik macierzy \(A=[a_{ij}]\in M(n,n;\mathbb K)\)
\(\displaystyle \det A= \sum _{\rho\in{\cal S}_n} sgn\, \rho \ {a_{\rho (1)1}}...{a_{\rho (n)n}}\) (2.2)
Przykład 2.2
Niech dana będzie baza \(v_1,...,v_n\) przestrzeni wektorowej \(V\). Niech \(P\) będzie macierzą przejścia od bazy \(v_1,..., v_n\) do bazy \(-v_1,v_2..,v_n\). Widać od razu, że \(\det A=1\).
Dowiedziemy teraz kilku podstawowych własności wyznacznika.
Twierdzenie 2.3
Dla dowolnych macierzy \(A,B\in M(n,n;\mathbb K)\) zachodzi wzór
\(\det AB=\det A\, \det B.\) (2.3)
Dowód
Niech \(A=[a_{ij}]\) i \(B=[b_{ij}]\). Wiemy, że wyrazy \(c_{ij}\) macierzy \(C=AB\) wyrażają się wzorem
\(\displaystyle c_{ij}=\sum _{l=1}^n a_{il}b_{lj}.\) (2.4)
Niech \(A_1,...,A_n\) oznaczają kolumny macierzy \(A\) zaś \(C_1,...,C_n\) - kolumny macierzy \(C\). Na podstawie formuły (2.4 ) mamy wzór
\(\displaystyle C_j=\sum _{l=1}^n b_{lj}A_l.\) (2.5)
Otrzymujemy następujące równości
\(\begin{aligned}\det AB&=\det (C_1,...,C_n)\\ &=\det \left (\sum _{l_1=1}^nb_{l_11}{A_{l_1}},...,\sum _{l_n=1}^nb_{l_nn}{A_{l_n}}\right )\\ &= \sum _{{l_1},...,{l_n}=1}^n {b_{l_11}}...{b_{l_nn}}\, \det ({A_{l_1}},...,{A_{l_n}})\\ &=\sum _{\small{\begin{array} {l} \ \ \ \ \ \ \ l_1,...,l_n\\ \ {l_a}\ne {l_b}\ {\rm dla}\ a\ne b\end{array} }} {b_{l_11}}...{b_{l_nn}}\, \det ({A_{l_1}},...,{A_{l_n}})\\ &= \sum _{\rho \in {\cal S}_n}{b_{\rho (1)1}}...{b_{\rho (n)n}}\, \det ({A_{\rho (1)}},...,{A_{\rho (n)}})\\ &= \sum _{\small{\rho \in {\cal S}_n}} sgn\, \rho \ {b_{\rho (1)1}}...{b_{\rho (n)n}}\, \det\, A\\ &=\det A\, \det B \end{aligned}\)
Korzystając z definicji wyznacznika, łatwo widać, że wyznacznik macierzy jednostkowej \(I\) jest równy \(1\). A zatem, jeśli \(A\) jest macierzą odwracalną, to
\(1=\det I=\det (AA^{-1})=(\det A)(\det A^{-1}).\)
Oznacza to, że macierz odwracalna ma wyznacznik różny on zera, a wyznacznik macierzy odwrotnej jest odwrotnością wyznacznika macierzy danej. Mamy więc wzór
\(\det (A^{-1})=(\det A)^{-1}\) (2.6)
dla macierzy odwracalnej \(A\). Macierz, której wyznacznik jest różny od zera nazywa się macierzą nieosobliwą.
Załóżmy teraz, że macierz \(A\) ma niezerowy wyznacznik. Wtedy kolumny macierzy \(A\), jako wektory przestrzeni \(\mathbb K ^n\) są liniowo niezależne (na podstawie (Lematu 1.1). Oznacza to, że, jeśli \(A\) potraktujemy jako odwzorowanie liniowe z \(\mathbb K ^n\) do \(\mathbb K ^n\), to \(A\) jest izomorfizmem. A zatem macierz \(A\) jest odwracalna. Mamy więc
Twierdzenie 2.4
Macierz \(A\) jest odwracalna wtedy i tylko wtedy, gdy jest nieosobliwa.
Twierdzenie 2.5
Jeżeli \(A\in M(n,n;\mathbb K)\), to \(\det A^*=\det A\).
Dowód
Oznaczmy przez \(B=[b_{ij}]\) macierz dualną do \(A=[a_{ij}]\). A zatem \(b_{ij}=a_{ji}\). Mamy
\(\displaystyle \det B=\sum _{\rho \in{\cal S}_n} sgn\rho\ b_{\rho (1)1}\cdot\cdot\cdot b_{\rho (n)n}.\)
Dla każdej permutacji \(\rho \in{\cal S}\) weźmy \(\rho ^{-1}\). Jeśli \(\rho (i)=j\), to \(\rho ^{-1} (j)=i\). Zatem iloczyn \(b_{\rho (1)1}\cdot\cdot\cdot b_{\rho (n)n}\) jest równy iloczynowi \(b_{1\rho ^{-1}(1)}\cdot\cdot\cdot b_{n\rho ^{-1}(n)}\) (po ewentualnym spermutowaniu czynników). Ponieważ odwzorowanie \({\cal S}_n\ni \rho \longrightarrow \rho ^{-1}\in {\cal S }_n\) jest bijekcją i dla każdej permutacji \(\rho\) zachodzi równość \( sgn \ \rho = sgn\ {\rho }^{-1}\), zatem
\(\begin{aligned}\det B&=\sum _{\rho \in{\cal S}_n} sgn\, \rho \, b_{1\rho (1)}\cdot\cdot\cdot n_{n\rho (n)}\\ &= \sum _{\rho \in{\cal S}_n} sgn \, \rho \, a_{\rho (1)1}\cdot\cdot\cdot a_{\rho (n)n}=\det A. \end{aligned}\)
Z powyższego twierdzenia dostajemy następujący wzór na wyznacznik macierzy \(A=[a_{ij}]\)
\(\displaystyle \det A= \sum _{\rho \in{\cal S}_n} sgn\, \rho \,\ a_{1\rho (1)}\cdot\cdot\cdot a_{n\rho (n)}.\) (2.7)
Wyznacznik jest \(n\)-liniową antysymetryczną funkcją wierszy.
Zauważmy teraz, że jeśli w macierzy \(A\) do pewnej kolumny (lub
pewnego wiersza) dodamy kombinację liniową pozostałych kolumn (lub pozostałych wierszy), to wyznacznik macierzy się nie zmieni. Wynika to z wieloliniowości wyznacznika i z warunku 2. Lematu 1.1. Jeśli zamienimy miejscami dwie kolumny (lub dwa wiersze), to wyznacznik zmieni swój znak. Jeśli pewną kolumnę macierzy \(A\) pomnożymy przez skalar \(\lambda\), to dla otrzymanej w ten sposób macierzy \(A'\) mamy wzór \(\det A'=\lambda \det A\). W szczególności, wymienione właśnie operacje na macierzach są takie, że, po ich zastosowaniu do danej macierzy, wyznacznik macierzy się nie zmieni lub łatwo kontrolujemy ewentualne zmiany wyznacznika tej macierzy. Mówimy, że są to operacje elementarne (lub dopuszczalne ze względu na wyznacznik). Oczywiście sensowne jest mnożenie wierszy lub kolumn przez skalary różne od \(0\).
Udowodnimy teraz pewną pożyteczną rachunkową własność wyznacznika.
Twierdzenie 2.6
Niech \(A\in (k,k;\mathbb K)\), \(B\in M(k,n-k;\mathbb K)\), \(C\in M(n-k,n-k;\mathbb K)\) zaś \(O\) oznacza zerową macierz z \(M(n-k,k;\mathbb K)\). Zachodzi wzór
\(\det\left [\begin{array} {lr} \ A \ B\\ \ O\ C \end{array} \right ]=\det A\ \det C\) (2.8)
Dowód
Dla ustalonych macierzy \(A\) i \(B\) rozważmy następujące odwzorowanie
\(\phi :M( n-k,n-k;)\ni C\longrightarrow \phi (C)= \det\left [\begin{array} {lr} \ A \ B\\ \ O\ C. \end{array} \right ]\)
Odwzorowanie \(\phi\), jako odwzorowanie \(n-k\) rzędów macierzy \(C\) jest \((n-k)\)-liniowe i antysymetryczne. A zatem, na podstawie rozważań z początku tego wykładu, wiemy, że
\(\phi (C)= \phi (I) \ \det C,\)
gdzie \(I\) jest macierzą jednostkową. Pokażemy, że \(\phi (I)=\det A\). Ustalmy macierz \(B\) i rozważmy odwzorowanie
\(\psi :M(k,k;\mathbb K)\ni A\longrightarrow \psi (A)=\det \left [\begin{array} {lr} \ A \ B\\ \ O\ I. \end{array} \right ]\)
Traktując to odwzorowanie jako odwzorowanie \(k\) kolumn macierzy \(A\), widzimy, że odwzorowanie to jest \(k\)-liniowe antysymetryczne. A zatem, tak jak wyżej, dostajemy
\(\psi (A)=\psi (I) \ \det A .\)
Wystarczy teraz udowodnić, że
\(\det \left [\begin{array} {lr} \ I \ B\\ \ O\ I \end{array} \right ]=1,\)
gdzie \(I\) w odpowiednim miejscu oznacza macierz jednostkową odpowiedniego wymiaru. Ostatni wzór zostawiamy jako ćwiczenie.
W szczególności, zachodzi wzór
\(\det \left [ \begin{array} {lcccr} \ 1\ a_{12}\ .\ .\ .\ a_{1n}\\ \ 0\ \ \ \ \ \\ \ . \ \ \ \ \ \ \\ \ .\ \ \ \ \ \ \ B \ \\ \ . \ \ \ \ \ \ \\ \ 0\ \ \ \ \ \ \ \ \end{array} \right ]= \det B,\) (2.9)
gdzie \(B\in M(n-1,n-1;\mathbb K)\).
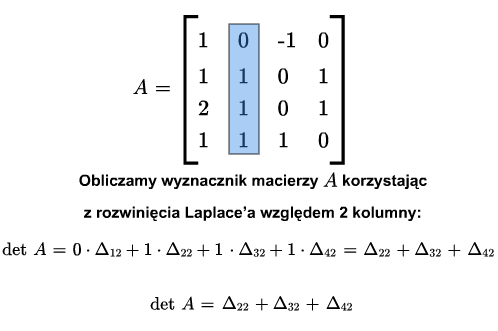
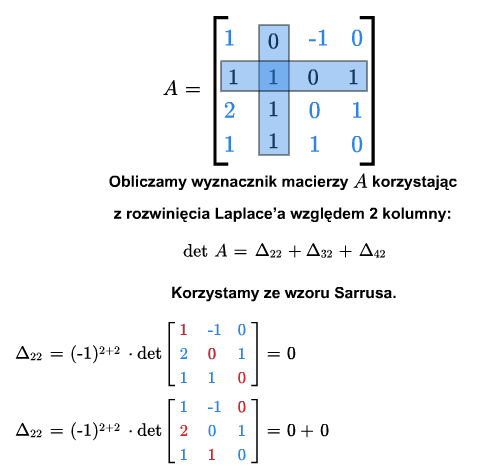
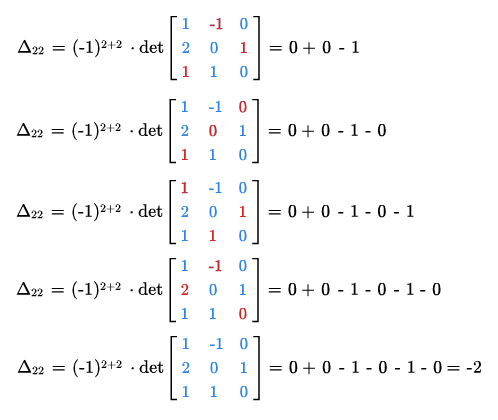
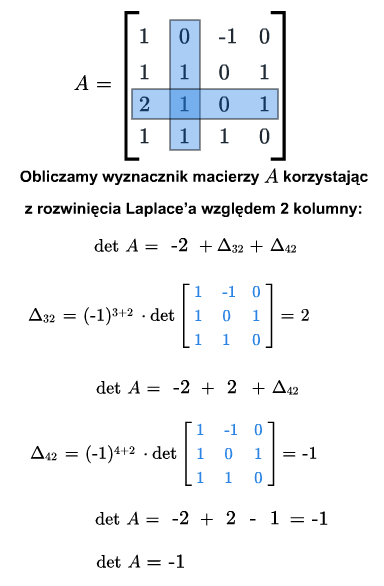
Udowodnimy teraz twierdzenie o tzw. rozwinięciu Laplace'a względem \(j\)-tej kolumny.
Twierdzenie 2.7
Niech \(A=[a_{ij}]\in M(n,n;\mathbb K)\). Dla każdego ustalonego
wskaźnika \(j\) (\(j=1,...,n\)) zachodzi wzór
\(\det A = a_{1j}\Delta _{1j}+...+a_{nj}\Delta _{nj},\) (2.10)
gdzie \(\Delta _{ij}\) oznacza wyznacznik macierzy otrzymanej z
macierzy \(A\) powstałej z macierzy \(A\) przez wykreślenie \(i\)-tego wiersza i \(j\)-tej kolumny, pomnożony przez \((-1) ^{i+j}\).
Dowód
Niech \(A_1,...,A_n\) będą kolumnami macierzy \(A\). Macierz
\(A\) traktujemy jako ciąg kolumn, tzn. \(A= [A_1,...,A_n]\). Jeśli \(e_1,...,e_n\) jest bazą kanoniczną przestrzeni \(n\), to
\(\displaystyle A_j =\sum _{i=1}^n a_{ij} e_i.\)
Zatem, pamiętając o tym, że wyznacznik jest \(n\)-liniową antysymetryczną funkcją kolumn, dostajemy
\(\displaystyle \det A= \sum _{i=1}^n a_{ij}\det [ A_1,...,A_{j-1}, e_i, A_{j+1},...,A_n].\)
Wystarczy zauważyć, że
\(\displaystyle \det [A_1,..., A_{j-1}, e_i,A_{j+1},..., A_n] = \Delta _{ij}.\)
W tym celu przesuńmy \(j\)-tą kolumnę macierzy \([A_1,..., A_{j-1}, e_i,A_{j+1},..., A_n]\) w lewo na pierwsze miejsce. Wykonujemy
\(j-1\) transpozycji. W tak otrzymanej macierzy przesuńmy \(i\)-ty wiersz na pierwsze miejsce. W tym celu dokonujemy \(i-1\) transpozycji. Po tych operacjach dostajemy macierz postaci
\(\left [ \begin{array} {lcccr} \ 1\ a_{i2}\ .\ .\ .\ a_{in}\\ \ 0\ \ \ \ \ \\ \ . \ \ \ \ \ \ \\ \ .\ \ \ \ \ \ \ A_{ij} \ \\ \ . \ \ \ \ \ \ \\ \ 0\ \ \ \ \ \ \ \ \end{array} \right ],\)
gdzie \(A_{ij}\) jest macierzą otrzymaną z macierzy \(A\) przez wykreślenie \(i\)-tego wiersza i \(j\)-tej kolumny.
Korzystając ze wzoru (2.9) otrzymujemy
\(\det [A_1,..., A_{j-1}, e_i,A_{j+1},..., A_n] =(-1)^{j-1}(-1) ^{i-1}\det A_{ij}= \Delta _{ij}.\)
Na podstawie Twierdzenia 2.5 otrzymujemy wzory na rozwinięcie
Laplace'a względem \(i\)-tego wiersza.
Twierdzenie 2.8
Niech \(A=[a_{ij}]\in M(n,n;\mathbb K)\). Dla każdego ustalonego wskaźnika \(i\) (\(i=1,...,n\)) zachodzi wzór
\(\det A = a_{i1}\Delta _{i1}+...+a_{in}\Delta _{in},\) (2.11)